Cuando hablamos de robótica industrial a todos se nos viene a la mente un brazo robótico y los movimientos rápidos y lentos, como posiciones exactas capaces de realizar.
Estos brazos robóticos tienen como características principales los grados de liberta, trayectorias y recorridos posibles, y la finalidad del uso de la herramienta colocada en el final del brazo.
El uso de la robótica industrial se ha definido siempre como un sustituto de mano de obra humana, si bien además debemos tener en cuenta la posibilidad de trabajar de estos equipos en atmósferas peligrosas y poco seguras para los humanos, así como manejo de elementos pesados que fatigarían rápidamente a un operario.
De todo ello se encargan de estudiar y dar apoyo a entidades del sector en la Asociación Española de Robótica y Automatización (AER).
En cuanto a aplicaciones, hablamos de temperaturas altas por equipos de soldadura, atmósferas irrespirables por pinturas, colocación de elementos frágiles en localizaciones exactas mediante ventosas, son algunos de los ejemplos por los que usar estos robots en la industria.
El trabajo robusto de estos robots y los escenarios peligrosos por colisión hacen tomar medidas de seguridad adecuadas en cuanto al trabajo conjunto con operarios, siendo la principal medida de seguridad el uso de jaulas y el alejamiento de las partes móviles de posibles colisiones con personas o elementos. Existen normalizaciones de aplicación para medidas de seguridad como puede ser la UNE-EN ISO 10218-1.
Herramientas de los robots
Una vez descritos las posibilidades del brazo robots se pretende conocer cuáles son las usuales herramientas finales que se colocan en un brazo robótico para desarrollar diferentes trabajos de robótica industrial.
La programación en robótica industrial necesita de lenguajes de programación adecuados en los que compaginar los movimientos del brazo robots con la aplicación de la herramienta final.
De modo convencional, al pensar en un brazo robótico pensamos en unas pinzas ubicadas en la punta como herramienta final. Pero a continuación veremos que existen otras muchas herramientas a utilizar y cuales son cada una de sus funciones principales. El promover el estudio y distintas aplicaciones de la robótica industrial es el principal objetivo del Comité Español de Automática.
Cada una de la modalidad de herramientas descritas de uso en robótica industrial tendrá muchas modificaciones y adaptaciones en función de la envergadura del trabajo a llevar a cabo, de modo que en cada caso indicaremos una aplicación usual si bien existen multitud de adaptaciones y aplicaciones. Igualmente existe la posibilidad de aplicaciones donde la herramienta puede ser intercambiable y un mismo robot industrial se utilice para varios procesos llevando a cabo el cambio de herramienta final.
Herramientas de los robots para mecanizado y fabricación.
En el campo de la industria y de la aplicación de robots una fracción de estos se dedica a la aplicación de mecanizados mediante herramientas las cuales pueden ser de adhesión de material o de arranque de material. Para lo cual la robótica industrial ha desarrollado entre otras las siguientes herramientas.
Pistola pintura, barnices, acabados superficiales.
Una de las funciones más habituales en robótica industrial es el uso de robots para aplicar pinturas o barnices a piezas de morfología compleja.
La robótica industrial permite realizar una secuencia de movimientos adecuada para barrer cualquier forma y con la herramienta de pistola poder aplicar la pintura de forma adecuada.
La automatización de este proceso evita la exposición prolongada a operarios en una atmósfera poco respirable.

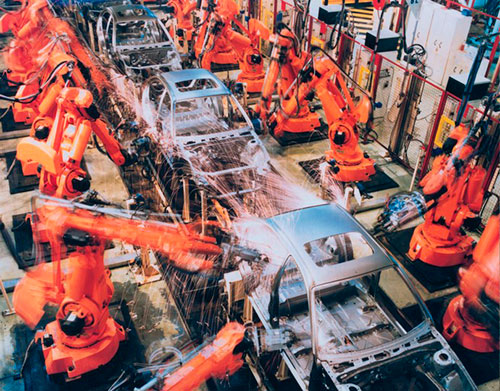
Soldadura
Hablaremos en general de la herramienta soldadura si bien existen diversos tipos de ellas en función de la técnica utilizada para soldar (arco voltaico, TIG, MIG, electrodo, hilo, etc.)
Son dos las principales ventajas del uso de robots con herramientas de soldadura, la primera es la gran maniobrabilidad y repetitividad de trayectorias exactas en la aplicación de puntos y cordones de soldadura, y la segunda el trabajo en una atmósfera peligrosa de temperatura y proyección de elementos incandescentes realizado por robots autónomos sin poner en peligro a operarios.

Mecanizado (talador, fresadora, sierra)
El desarrollo de herramientas de mecanizado como pueden ser bancos de control numérico, tornos, taladros, fresadoras, sierras, etc. está muy extendido.
No obstante estas herramientas suelen estar limitadas en los ejes de trabajo y en fabricación de piezas lineales.
La posibilidad de incluir estas herramientas en un brazo robots rompe con la necesidad de diseñar piezas lineales y pudiéndose abrir el campo de fabricación automatizada a cualquier tipo de pieza por compleja que sea su estructura y morfología. De modo que podemos incrementar la producción de piezas más complejas, reduciendo el tiempo de fabricación y el cambio entre distintas herramientas de mecanizado.
En esta aplicación de herramientas resulta interesante también la posibilidad de intercambiabilidad de herramienta, por ejemplo en una herramienta final tipo taladro la posibilidad que de forma automática el robot pueda cambiar entre distintas brocas de diferente diámetro dispuestas en una zona de herramientas.

Cañón de agua a presión y Granallado (chorro abrasivo)
El proceso de chorro de agua a presión como herramienta se utiliza para la realización de cortes en distintos materiales, por otra parte el proceso de granallado consiste en un chorro de material abrasivo que aplicado a una pieza puede alisar o eliminar materiales contaminantes.
Estos procedimientos requieren del consumo de una energía elevada y un gasto de material (agua, aire a presión, elemento abrasivo) por lo que es de entender que se pretenda realizar el trabajo en el menor tiempo posible y siguiendo las trayectorias de modo eficiente.
Es por esto que la aplicación de robots resulta ideal en cuanto a trayectorias eficientes y movimientos a velocidad y en modo adecuado.

Herramientas de los robots para traslado, colocación y control.
En el campo del almacenaje como la distribución de materiales en procesos de fabricación el uso de robots permiten el manejo de diferentes tipos de cargas y volúmenes así como la colocación espacial con una exactitud adecuada. Para lo cual la robótica industrial ha desarrollado entre otras las siguientes herramientas.
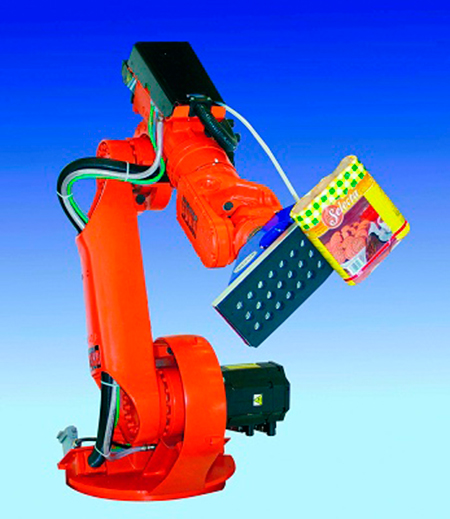
Pinza
Se trata de la herramienta más convencional que se utiliza en un brazo robótico, con esta herramienta en brazo puede agarrar (pinzar) distintos elementos para poder cogerlos y depositarlos de una a otra ubicación.
En función de las dimensiones de las piezas así como los materiales y las fuerzas que se ejercen al coger los elementos, estos pueden ser de distintas materias, volúmenes y pesos.
Como aplicación principal podemos poner como ejemplo el coger distintos productos y colocar dentro de una caja o colocar en una posición predeterminada llevando a cabo un paletizado.

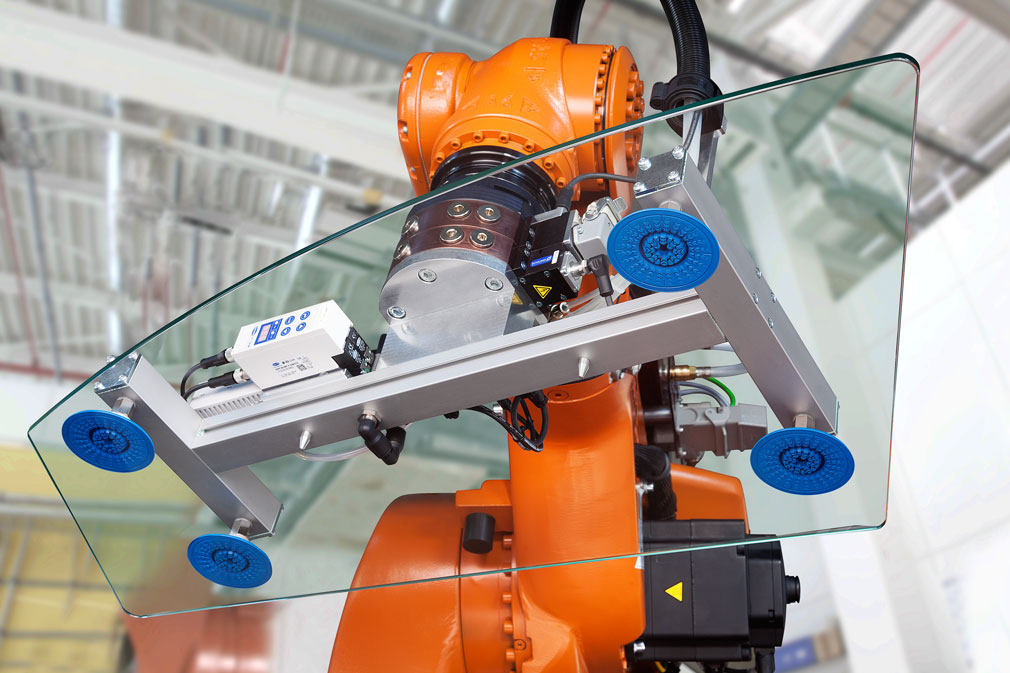
Ventosa
Durante mucho tiempo los robots se han visto encasillados en unos pocos trabajos por la imposibilidad de manipular ciertos productos voluminosos o delicados.
Con la aparición del campo de la robótica industrial de herramientas como ventosas el campo de aplicación se abre sorprendentemente.
El uso de ventosas como herramienta final permite al robot coger elementos de muy diversas formas y volúmenes (los cuales eran inviables poder coger mediante pinzas).
Nuevamente el uso de robots en este caso se centra en la posibilidad de coger elementos y de su colocación de coordenadas exactas con una repetitividad que ofrece una elevada productividad sin que un operario sufra fatiga por repetición ni esfuerzo de carga.
Cámara de visión
En ocasiones los procesos de fabricación finalizan con una tarea de control de calidad la cual requiere de comprobar visualmente la buena ejecución de distintos procesos llevados a cabo.
Este proceso de calidad en ocasiones se hace a un muestreo de piezas fabricadas, pero cuando es necesario hacerlo a todas piezas por el nivel de calidad exigido conlleva un tiempo elevado.
Es en este caso en el que la aplicación de un sistema de visión adaptado a un robot puede reducir el tiempo de inspección, además actualmente se ha avanzado mucho en reconocimiento de visión lo que permite que todo el proceso de visión y comprobación se pueda automatizar.
En este caso conseguimos mediante la aplicación de robots que el proceso de control de calidad no suponga un cuello de botella para el total de la fabricación.

Medidas y control de calidad (sensor de precisión)
En algunos procesos de control de calidad se requiere de realizar medidas tan exactas en las que las tolerancias permitidas no exceden de submúltiplos del milímetro, por consiguiente es de entender que estas medidas no sean fácil de realizar por un operario con ningún elemento calibrado.
Se requiere de sensores especiales y de una alta precisión, es en este campo donde entran también el uso de robos los cuales puede portar como herramienta un sensor de precisión y poder medir distintos puntos de una pieza.
En este caso la repetitividad de las trayectorias y el control de los movimientos exigidos al brazo robótico tienen una exigencia adecuada a la precisión de las medidas que se requieren hacer.

Hemos hecho un recorrido por las herramientas más utilizadas en robótica industrial, si bien puede existir variaciones de estas y otras muchas, la finalidad es que seamos conscientes de la importancia de elegir adecuadamente una herramienta en función de nuestras necesidades, y la posibilidad de aplicar robots industriales a una gran variedad de trabajos.
Categorizado en:
Gestión Integrada



Comentarios
Muy interesante para alguien que va estudiar la carrera de robótica