Existe alguna confusión en la literatura dedicada en robótica entre grados de libertad y grados de movilidad. Un buen tema para discusión sobre robots está en cómo se describen sus grados de libertad (GDL) o cuántos GDL se necesitan para una determinada aplicación. También se puede definir el número de grados de libertad de la tarea GDLt y se tiene que cumplir que GDL≥GDLt.
El número de coordenadas independientes necesarias para expresar la posición de todas sus partes se conoce como el número de grados de libertad del sistema. El número de grados de libertad con que cuenta un robot determina la accesibilidad de este y su capacidad para orientar su herramienta terminal. Algunos autores prefieren usar el término grado de movilidad para describir esas articulaciones que dan el GDL adicional al sistema sin cambiar el GDL del elemento final. El término grado de movilidad puede ser más descriptivo que el de grado de libertad añadido, especialmente si el elemento final no dispone de los seis GDL.
¿Qué es el grado de libertad (GDL) en robótica?
El número de grados de libertad define la cantidad de partes independientes de un robot o máquina y, por ende, su libertad para adoptar diferencias posiciones. Entre los grados de libertad distinguimos dos posibles movimientos: de traslación y rotación. Los movimientos de traslación se refiere a la capacidad de una figura de desplazarse de forma lineal, mientras que el movimiento rotativo hace referencia a un movimiento giratorio de un objeto en torno a su propio eje.
En robótica, el número de grados de libertad sirve para designar las habilidades motrices de los robots y los androides y está ligado a la cantidad de articulaciones y ejes de movilidad de un robot.
Grado de libertad en brazos robóticos
Todos los brazos robóticos tienen un número de grados de libertad de movilidad que abarca desde uno hasta 12 o 13 ejes típicamente. Los grados de libertad influyen directamente en que un robot sea funcional, por lo que es un aspecto que incumbe especialmente a los diseñadores e ingenieros industriales a la hora de idear y diseñar brazos robóticos y decidir una cantidad de ejes deseable. Que un brazo robótico tenga más grado de liberta de movimiento no siempre es algo positivo; en función de su utilización, será ideal incluir más o menos grados de libertad.
Si no se dispone de capacidad suficiente de movimiento y de flexibilidad motriz, un robot no cumplirá con las expectativas de las tareas que se le encargan. Por otra parte, un robot con un grado de libertad elevado dificulta considerable el manejo correcto y la precisión del robot.
Por norma general, no se fabrican brazos robots con tan solo uno o dos grados de libertad de movimiento, puesto que su capacidad motriz sería demasiado reducida. Un ejemplo de un robot con grado 3 de movilidad de movimiento es una grúa: esta puede moverse de lado a lado, de arriba a abajo y hacia delante y hacia detrás.
3 y 4 grados de libertad de un robot o brazo robótico resultan muy funcionales para muchas aplicaciones dentro y fuera del campo industrial. No obstante, cada vez se exige más agilidad para optimizar procesos industriales, por lo que va creciendo la demanda de robots con 5, 6 o más grados de libertad de movilidad.
Los 6 grados de libertad en un robot aportan plena libertad a la movilidad robótica, puesto que permiten a un robot moverse en todos los ejes posibles que pueden representarse en un plano cartesiano, tanto con movimientos de rotación como de traslación.
Ejemplo de grado de libertad en robótica
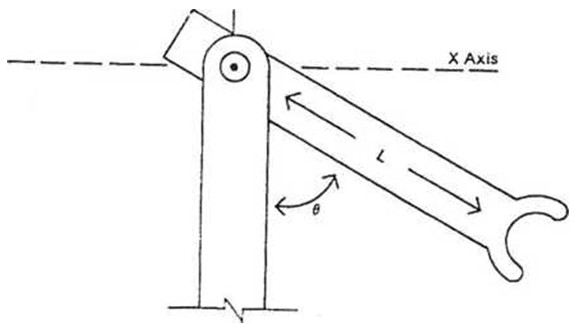
Para explorar movilidad en detalle, consideremos un robot con una sola articulación. Esta articulación particular actuará como una bisagra, cambiando las coordenadas X e Y (o cualquier par de coordenadas del punto final del elemento) a la vez. Sin embargo, estos cambios no son independientes; esto es, para cualquier posición X resultante obtenida por rotación del brazo, hay una sola posición Y posible. Para una longitud fija del elemento (L), las posiciones X1 e Y1 del punto final dependen del ángulo de elevación (θ) seleccionado, por ello el robot de la figura tiene un único GDL. El punto final del brazo puede considerarse como un movimiento en un arco.
Cuando se introduce un segundo ángulo en el mismo plano, se añade un segundo GDL, desde este momento hay más de una posición Y para cada posición X, y el punto final del brazo puede considerarse que se mueve en un área. Añadiendo una tercera articulación de giro en el mismo plano no se conseguirá otro GDL en la posición del punto final o TCP porque solo hay dos GDL posicionales que están en el mismo plano. Añadiendo otra articulación rotativa se conseguirá un GDL en la orientación del TCP, aunque este método no sea la mejor manera de obtener el GDL adicional porque habría interacción entre el GDL posicional y el GDL de orientación. La principal razón para añadir una tercera articulación de este tipo está en conseguir un grado de movilidad para alcanzar la posición deseada.
Categorizado en:
Gestión Integrada